One runtime. Three product forms.
The Swiss army knife
for CAN and K-Line.
A modular CAN and K-Line platform for OBD, simulation, diagnostics and tools —
on the desktop, on a touch device, and in the wire.
CANsole brings bus monitoring, OBD/UDS/KWP diagnostics, ECU simulation, logging, replay,
test patterns and remote control into a single system. Studio runs on the desktop, Touch
works standalone at the bench or in the vehicle, and ECUconnect turns a small adapter
into a headless diagnostic node. All three share one runtime.
Why CANsole
Between cheap dongles and enterprise restbus systems.
Most automotive bus tooling falls into one of two camps: low-cost OBD dongles that
barely scratch the surface, or six-figure restbus simulation rigs that nobody outside
a Tier‑1 lab can afford. CANsole sits in between — serious enough for development
and reverse engineering, accessible enough for a single bench.
Active simulation, not just monitoring
Emulate ECUs and full restbuses, not only sniff the wire. Presets and bundles let you
reproduce specific vehicle scenarios on demand.
Remote control by design
Every CANsole node speaks remote control from day one. Drive a Touch unit from
Studio, automate ECUconnect from CI, or scope out a bench from your laptop.
One runtime, three surfaces
The same C++ core runs on macOS, Windows, Linux, ESP32 touch hardware, and
ECUconnect adapters. UIs are control surfaces, not the runtime itself.
Reproducible tests
Preset-based scenarios, golden test sequences and replay turn ad-hoc bench work
into something you can rerun next week and next year.
Standalone & networked
Touch boots into a known state and works without a host. Or join Wi-Fi/USB and
become part of a larger setup. No lock-in either way.
Visible TX arming
Anything that can write to a real bus must be explicit, visible and loggable.
No silent transmissions, no surprise frames.
What CANsole does
Three pillars on one runtime.
Watch the bus, talk to ECUs, simulate a vehicle. Each pillar is independently useful —
together they cover the full development loop from passive observation to active testing.
Cockpit
Live monitoring & bus health
Look at the wire. Frame streams, decoded signals, error counters and timing
— at the bench, in the vehicle, or remote.
- Live frame stream with filter chains and triggers
- Bus load, frame rate, error frames, REC/TEC, bus-off transitions
- Per-ID cycle time, jitter and freshness tracking
- DBC-decoded signal views, strip charts and gauges
- K-Line line state, idle/break detection, byte trace
- Logging with rotation, time-aligned multi-channel capture, replay
Diagnose
Talk to ECUs
Ask ECUs questions, read live data, walk diagnostic sessions and write changes
— against a real bus or against the emulator.
- OBD-II live PIDs, freeze frames, DTC read/clear, readiness, VIN/CAL-ID
- UDS sessions, tester present, ECU reset and DTC services (0x19)
- DID read/write (0x22 / 0x2E), RoutineControl (0x31), SecurityAccess
- ISO-TP and ISO-TP/FD transport, multi-ECU address discovery
- KWP, TP2.0 and ELM327/STN passthrough for legacy stacks
- Diagnostic trace timeline — request/response pairs, not just frames
Emulate
ECU & restbus simulation
Stand up a controllable virtual vehicle. Build presets from real captures,
replay scenarios, and reproduce specific bus conditions on demand.
- Multi-ECU emulation with arbitration IDs, services and DIDs
- Preset and bundle library, JSON-defined ECU specs
- Spec import from candump, CL1000, ECUconnect and PCAPNG captures
- Real-hardware bridge between virtual ECUs and a physical bus
- SecurityAccess seed/key models, RoutineControl scenarios
- Bus timing simulation, ISO-TP flow control fault injection
The Lineup
Three forms. One platform.
Studio, Touch and ECUconnect are not separate products that happen to share a logo.
They are three control surfaces over the same diagnostic and simulation runtime.
Pick the one that fits the workspace you are in.
Desktop
CANsole Studio
The desktop workspace for presets, analysis, simulation, logging, replay and remote
control of Touch and ECUconnect nodes.
- macOS, Windows, Linux
- Visual preset and bundle editor
- Live bus inspector with filters
- Remote bridge to Touch & ECUconnect
Studio details
Standalone
CANsole Touch
A standalone diagnostic node with a 7″ touch display. Power it from OBD,
pick a preset, monitor or simulate — no laptop required.
- ESP32-S3 touch hardware
- Boot · preset · diagnose workflow
- Live status: bus, TX arm, errors
- Wi-Fi / USB remote control
Touch details
Headless
CANsole ECUconnect
Firmware that turns an ECUconnect adapter into a remote-controlled diagnostic and
simulation node — perfect for vehicles, rigs and CI.
- Headless ECU / restbus simulation
- TCP / UDP services for diag clients
- Stable adapter identity
- Reproducible automation node
ECUconnect details
Capability Map
Buses, protocols and tools.
What the platform speaks today, and where it is headed. Not every variant carries every
capability — some are tied to specific hardware. Items shown dashed are planned.
Bus & Hardware
Classic CAN
K-Line / ISO 9141
CAN‑FD
ESP32 TWAI
MCP251XFD
OBD-II power
Diagnostic Protocols
OBD-II
UDS
KWP
ISO-TP
ISO-TP / FD
TP2.0
ELM327 / STN
ECUconnect TCP
HSFZ
DoIP
ENET Service Broker
Tools
Bus monitor
Frame sender
Pattern generator
Logging & export
Replay
Preset / bundle ECU sim
DTC set / clear
DID / PID models
Workflow
Remote control
Standalone
Status subscription
SecurityAccess stubs
RoutineControl
Memory transfer
Golden tests
In the Wild
Built for benches, rigs, and the road.
CANsole is shaped by real automotive workflows — the kind that happen between
a developer’s desk, a workshop bench, and the OBD port of an actual car.
Protocol development
Bring up new diagnostic flows against a controllable virtual ECU before risking
a real harness. Iterate on UDS sessions, security access and routine control without
pulling a vehicle into the lab.
Reverse engineering
Capture a real bus, replay it under controlled conditions, and bisect responses
until the message catalog falls into place. CAN, K-Line, and the transport layers
on top.
Bench & workshop tests
Drop a Touch unit on a bench, pick a preset, and have a working restbus under one
minute. No host required, no boot dance, no “wait, which COM port”.
CI & automation
ECUconnect nodes carry stable identities and TCP/UDP services. Wire them into a
pipeline and run the same diagnostic regression on every pull request.
Bus health surveys
Track down a flickering wakeup, a noisy ID or a cycle-time drift. Cockpit views
surface error frames, REC/TEC drift and per-ID jitter without manual capture spelunking.
DTC sweeps & ECU probes
Walk a UDS session against every ECU on the bus. Read DTCs, dump DIDs, capture
VIN and software versions — scriptable from Studio or an ECUconnect node.
Available today
Two pillars already ship under sister brands.
CANsole is the convergence target. While the unified runtime is in active development,
the live capabilities are already in production today as standalone desktop apps on
vanille.de. They will fold into Studio over time.
Cockpit + Diagnose, today
CANcorder
Cross-platform CAN logger and analyzer. Live capture, ISO-TP reassembly, plus
decoding for UDS, OBD-II, KWP2000, J1939, CCP and XCP. Frame sender, hex search
and a JSON plugin system for vendor protocols included.
Visit CANcorder
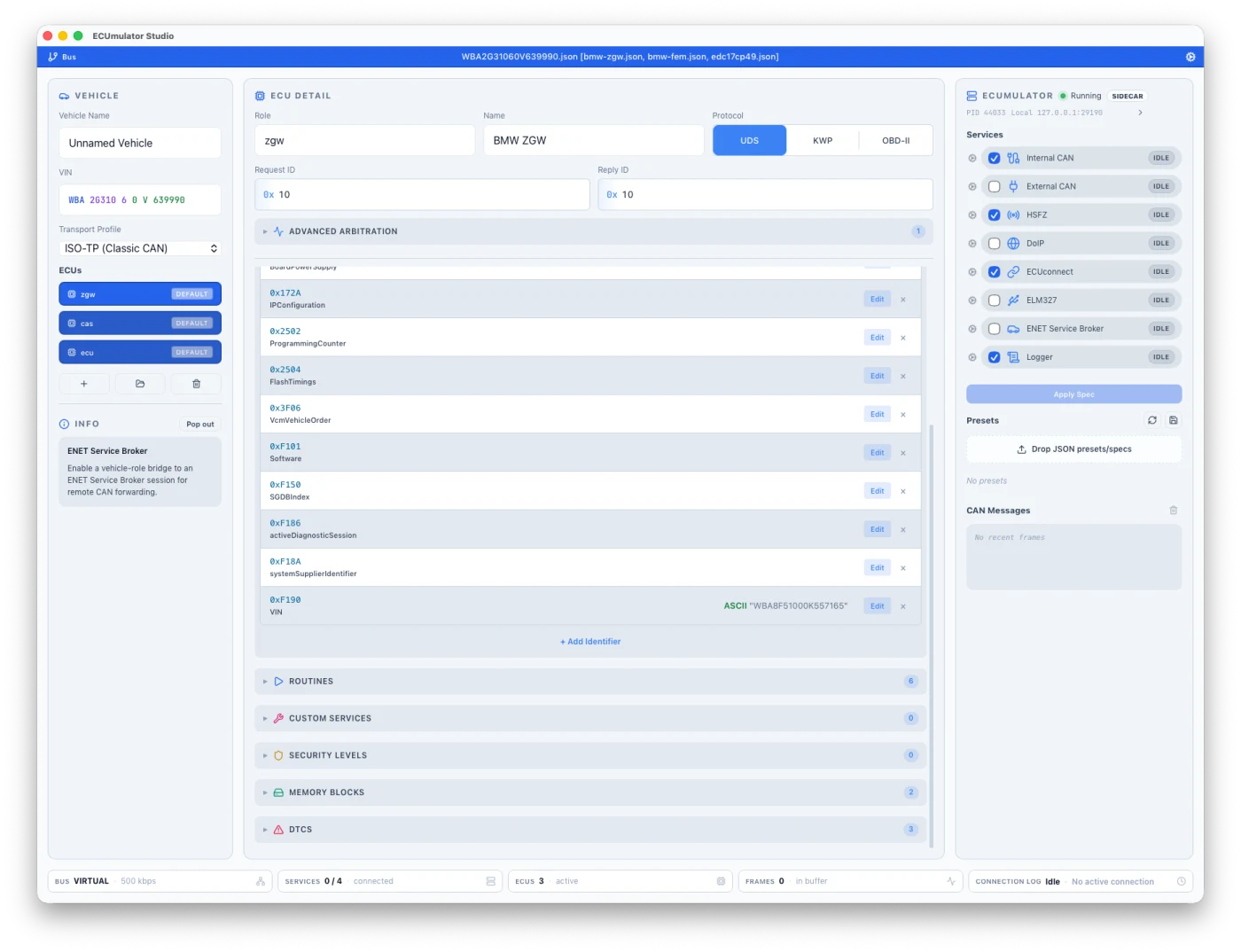
Emulate, today
ECUmulator Studio
Desktop ECU and restbus emulator. Multi-ECU specs in JSON, six service adapters
— CAN, ECUconnect TCP, HSFZ, DoIP, ELM327/STN and ENET Service Broker —
and spec import from real captures.
Visit ECUmulator Studio
Currently in active development.
CANsole is shaping up out of CAN Cockpit, ECUmulator, ECUconnect and ESPenlaub.
If you build automotive tooling and want early access, the architecture page is the place to start.